介绍了一下fluent里的动网格相关UDF
动网格相关宏
DEFINE_CG_MOTION
使用
#define DEFINE_CG_MOTION(name, dt, vel, omega, time, dtime) \
EXTERN_C void name(Dynamic_Thread *dt, real vel[], real omega[], real time, real time)
| Type | Parameter | Notes |
|---|---|---|
| symbol | name | UDF名字 |
| Dynamic_Thread* | dt | 指向动网格相关属性结构体的指针 |
| real | vel[ ] | 线速度。三个分量为xyz方向速度 |
| real | omega[ ] | 角速度。三个分量为以xyz轴为转轴的角速度 |
| real | time | 当前时间 |
| real | dtime | 时间步 |
| void | return | 无返回值 |
typedef struct dynamic_thread_struct
{
Dynamic_Thread_Rigid_Body_State current_state;
Dynamic_Thread_Rigid_Body_State tmp_state;
Dynamic_Thread_Rigid_Body_State init_state;
real dir_ref[3]; /* reference direction of motion */
real dir_prev[3]; /* previous direction of motion */
real axis[3]; /* body-fixed axis of motion */
real refo[3]; /* reference point */
real len[3]; /* length scales (s0, s1, skew) */
real h[2]; /* (hmin) (hmax), if applicable */
real geom_origin[3]; /* geom.: origin */
real geom_axis[3]; /* geom.: axis/normal */
real geom_radius; /* geom.: radius */
char geometry_name[132]; /* geometry of geometry function */
cxboolean geom_feature_p; /* geom.: use feature detection */
real geom_feature_angle; /* geom.: feature angle */
cxboolean sop_comp; /* solver options for system coupling/six dof switch */
real sop_scale; /* solver option scaling factor */
char sop_type_name[132]; /* solver option type name: ap, cell */
int sop_type; /* 0-volume-based, 1-coefficient-based, 2-udf (not implemented yet) */
int layer[2]; /* layering action */
real layer_factor; /* layering split/collapse factor */
int type; /* dynamic zone type */
int udf_type; /* mover, motion, 6DOF */
int face_remesh_count; /* remesh counter */
int face_remesh_action; /* split or collapse */
cxboolean sliding; /* allow nodes to slide/move? */
cxboolean remesh; /* allow faces/cells to be remesh? */
cxboolean layering; /* allow layering? */
cxboolean moving; /* freeze node motion? */
cxboolean remesh_globals_p; /* use global remesh parameters */
int sliding_method; /* method to slide */
int sliding_elements; /* spring smoothing element type */
int remeshing_method; /* method(s) to remesh */
cxboolean boundary_layer_deform; /* deform/move adjacent prisms
with boundary */
cxboolean user_defined_deform; /* allow deformation of user defined
zones */
cxboolean bc_exclude_motion; /* option to exclude boundary motion
in boundary condition */
char profile_udf_name[132]; /* udf or profile name */
void (*update)(); /* pointer to motion function */
struct thread_struct *thread; /* face/cell thread */
cxboolean separate_region; /* remesh region separately? */
int nloops; /* number of moving loops */
struct edge_loop_struct *loops; /* loop data structure */
struct objp_struct *lnodes; /* pointer to loop nodes */
cxboolean sdof_p; /* use 6DOF to compute motion */
cxboolean sdof_contribute_p; /* 6DOF: contribution of thread */
cxboolean perdisp_p; /* use Periodic Displacement to compute motion */
cxboolean surf_rev_done; /* Building surface of revolution done */
int trim_size; /* number of interpolating points for surf revolution */
real *axcrd; /* axial coordinate for surf of revolution */
real *radcrd; /* radial coordinate for surf of revolution */
cxboolean nested_p;
struct thread_struct *nest_thread; /* udf motion is specified on top of the motion of nest_thread */
cxboolean nested_local_rot_p; /* relative motion is specifed in local */
cxboolean nested_local_tran_p; /* coordinates or absolute coordinates */
char h_udf_name[2][64]; /* udf name for non-constant layer
height [0], [1] (corresponding
to height0 and height1) */
char contact_udf_name[64]; /* UDF name for contact detection */
real (*tmp_cg)[3];
real *tmp_theta;
real tmp_omega[3]; /* zone-motion variables */
unsigned int update_state; /* indicates if thread has been
remeshed, smoothed, etc. */
real gocart_param[5]; /* GoCart remeshing parameters
(max, growth rate, skew,
aspect ratio, remesh interval) */
cxboolean gocart_prisms_p; /* remesh GoCart with inflation
layers */
Prism_Parameters gocart_prism_param; /* GoCart prism parameters */
real tmp_r1; /* temporary memory */
real tmp_r2;
int tmp_i1;
struct dynamic_thread_struct *next; /* pointer to next */
} Dynamic_Thread;
样例
Example.1 刚体平动
#include "udf.h"
/*刚体平动示例*/
DEFINE_CG_MOTION(move, dt, vel, omega, time, dtime)
{
/*reset velocity*/
NV_S(vel, =, 0.0);
NV_S(omega, =, 0.0);
/*set v_x = 5e-3m/s*/
vel[0] = 5e-3;
}
Example.2 刚体转动
#include "udf.h"
/*刚体转动示例*/
DEFINE_CG_MOTION(rotate, dt, vel, omega, time, dtime) {
/*reset velocity*/
NV_S(vel, =, 0.0);
NV_S(omega, =, 0.0);
/*set omega_xy = 0.2 rad/s*/
omega[2] = 0.2;
}
Example.3 随时间变化的刚体运动
#include "udf.h"
static real v_prev = 0.0;
static real time_prev = 0.0;
/*刚体运动随时间变化示例*/
DEFINE_CG_MOTION(acceleration, dt, vel, omega, time, dtime)
{
real dv;
/*reset velocity*/
NV_S(vel, =, 0.0);
NV_S(omega, =, 0.0);
dv = dtime * 1e-3;
if(time < 1){
omega[2] = 0.1;
}
else if(time > (time_prev+EPSILON)){
v_prev += dv;
time_prev = time;
}
vel[0] = v_prev;
}
Example.4 实现单向流体-刚体运动耦合
- 在每个迭代步末尾计算物体当前所受作用力 $\mathbf{F}$
- 计算加速度 $a=F/m$
- 计算当前速度 $v_{t+1}=v_t+a\Delta t$
/*实现简单的流体与刚体运动的单向耦合*/
#include "udf.h"
/*****define some constants*****/
#define MASS 1
#define TIME_STEP 0.0001
/********************/
static real current_vel=0;
DEFINE_CG_MOTION(valva, dt, vel, omega, time, dtime)
{
real dv;
/* reset velocities */
NV_S(vel, =, 0.0);
NV_S(omega, =, 0.0);
vel[2] = current_vel;
}
/*利用UDF获取作用力*/
DEFINE_EXECUTE_AT_END(compute_vel) {
Domain *domain=Get_Domain(1);
int domain_id_send_to_node;
real force_temp = 0;
real total_force_z = 0;
real dv=0;
/*************并行版循环**************/
//此处定义仅在计算节点中使用的变量
#if !RP_HOST
Thread *thread;
face_t face;
real area[ND_ND];
#endif
//将需要进行循环的区域ID分发到节点上
domain_id_send_to_node = 10;
/*主机与节点的数据交换*/
host_to_node_int_1(domain_id_send_to_node);
#if !RP_HOST
thread = Lookup_Thread(domain, domain_id_send_to_node);
begin_f_loop(face, thread)
/*边界可能进行两次计算,利用PRINCIPAL_FACE_P(face, thread)壁面*/
if (PRINCIPAL_FACE_P(face, thread)) {
F_AREA(area, face, thread);
force_temp += area[2] * F_P(face, thread);
}
end_f_loop(face, thread)
#if RP_NODE /* Perform node synchronized actions here */
force_temp = PRF_GRSUM1(force_temp);
#endif /* RP_NODE */
#endif /* !RP_HOST */
/**********************************/
total_force_z += force_temp;
dv = total_force_z / MASS * TIME_STEP;
current_vel+=dv;
}
/*利用Report definition获取作用力*/
DEFINE_EXECUTE_AT_END(compute_vel_from_definition)
{
/*使用Get_Report_Definition_Values需要的变量*/
int nrOfvalues = 0;
real *values;
int *ids;
int index;
int counter;
/*计算当前速度需要的变量*/
real dv;
real total_force_z;
/*********获取报告定义值***********
//第一次调用,获取values的个数
int rv = Get_Report_Definition_Values("report-def-0", 1, &nrOfvalues, NULL,
NULL, NULL);
if (rv == 0 && nrOfvalues) {
Message("Report definition evaluated at iteration has %d values\n",
nrOfvalues);
/*为 values 和 ids 分配内存.*/
values = (real *)malloc(sizeof(real) * nrOfvalues);
ids = (int *)malloc(sizeof(int) * nrOfvalues);
/*第二次调用,获取 values 和 ids.*/
rv = Get_Report_Definition_Values("report-def-0", 1, NULL, values, ids,
&index);
/*calculate current velocity*/
total_force_z=values[0];
dv = total_force_z / MASS * TIME_STEP;
current_vel += dv;
/*释放内存*/
free(values);
free(ids);
} else {
/*不存在或还未求值,调用失败.*/
if (rv == 1) {
Message("report definition: %s does not exist\n", "report-def-0");
} else if (nrOfvalues == 0) {
Message("report definition: %s not evaluated at iteration level\n",
"report-def-0");
}
return;
}
}
补充知识
向量和维度操作
- D : demension
- S : scalar
- V : vector
- T : Tensor
对于2D求解器,将存在PR_2D宏定义。对于3D求解器,将存在PR_3D宏定义。
#if RP_3D
/*仅3D求解器可使用的操作*/
#endif
ND_ 分量操作宏
#if RP_3D
# define ND_ND 3
# define ND_VEC(x,y,z)x,y,z
#else
# define ND_ND 2
# define ND_VEC(x,y,z)x,y
#endif
#define ND_3 3
#define NV_VEC(a)a[ND_ND]
对于2D求解器,ND_ND=2。对于3D求解器,ND_ND=3。
对于2D求解器,NV_VEC将忽略第三个分量。
NV_VEC(a)定义一个名为a的符合当前维度的向量。
/********************
第一个运算符只能为等号相关的符号
如=, +=, /=
********************/
#define ND_S(a0,a1,a2,EQ,s)ND_VEC((a0)EQ(s),(a1)EQ(s),(a2)EQ(s))
//分量 与 标量 操作
//ND_S(a0,a1,a2,=,2);=>(a0,a1,a2)=(2,2,2);
#define ND_D(a0,a1,a2,EQ,x0,x1,x2)ND_VEC((a0)EQ(x0),(a1)EQ(x1),(a2)EQ(x2))
//分量 与 另一个分量 操作
//ND_D(a0,a1,a2,=,x0,x1,x2);=>(a0,a1,a2)=(x0,x1,x2);
#define ND_V(a0,a1,a2,EQ,x)ND_D(a0,a1,a2,EQ,(x)[0],(x)[1],(x)[2])
//分量 与 向量 操作
//ND_V(a0,a1,a2,=,x); (a0,a1,a2)=x;
#define ND_VS(a0,a1,a2,EQ,x,S,s)ND_VEC((a0)EQ(x)[0]S(s),(a1)EQ(x)[1]S(s),(a2)EQ(x)[2]S(s))
//分量 与 向量 与 标量 操作
//ND_VS(a0,a1,a2,=,x,*,2);=>(a0,a1,a2)=(x[0]*2,x[1]*2,x[2]*2)
#define ND_DS(a0,a1,a2,EQ,x0,x1,x2,S,s)ND_VEC((a0)EQ(x0)S(s),(a1)EQ(x1)S(s),(a2)EQ(x2)S(s))
//分量 与 分量 与 标量 操作
#define ND_DD(a0,a1,a2,EQ,x0,x1,x2,V,y0,y1,y2) ND_VEC((a0)EQ(x0)V(y0),(a1)EQ(x1)V(y1),(a2)EQ(x2)V(y2))
//分量 与 分量 与 分量 操作
#define ND_VV_S(a0,a1,a2,EQ,x,V,y,S,s)ND_VEC((a0)EQ((x)[0]V(y)[0])S(s),(a1)EQ((x)[1]V(y)[1])S(s),(a2)EQ((x)[2]V(y)[2])S(s))
//分量-向量-向量-标量
#define ND_VD_S(a0,a1,a2,EQ,x,V,y0,y1,y2,S,s)ND_VEC((a0)EQ((x)[0]V(y0))S(s),(a1)EQ((x)[1]V(y1))S(s),(a2)EQ((x)[2]V(y2))S(s))
//分量-向量-分量-标量
#define ND_DV_S(a0,a1,a2,EQ,x0,x1,x2,V,y,S,s)ND_VEC((a0)EQ((x0)V(y)[0])S(s),(a1)EQ((x1)V(y)[1])S(s),(a2)EQ((x2)V(y)[2])S(s))
//分量-分量-向量-标量
#define ND_DD_S(a0,a1,a2,EQ,x0,x1,x2,V,y0,y1,y2,S,s)ND_VEC((a0)EQ((x0)V(y0))S(s),(a1)EQ((x1)V(y1))S(s),(a2)EQ((x2)V(y2))S(s))
//分量-分量-分量-标量
#define ND_DS_DS(a0,a1,a2,EQ,x0,x1,x2,SX,sx,V,y0,y1,y2,SY,sy)ND_VEC((a0)EQ(((x0)SX(sx))V((y0)SY(sy))),(a1)EQ(((x1)SX(sx))V((y1)SY(sy))),(a2)EQ(((x2)SX(sx))V((y2)SY(sy))))
//分量-分量-标量-分量-标量
#define ND_DS_VS(a0,a1,a2,EQ,x0,x1,x2,SX,sx,V,y,SY,sy)ND_VEC((a0)EQ(((x0)SX(sx))V((y)[0]SY(sy))),(a1)EQ(((x1)SX(sx))V((y)[1]SY(sy))),(a2)EQ(((x2)SX(sx))V((y)[2]SY(sy))))
//分量-分量-标量-向量-标量
#if RP_3D
# define ND_OP(OP,x,y,z)((x)OP(y)OP(z))
#else
# define ND_OP(OP,x,y,z)((x)OP(y))
#endif
//对所有分量的操作
#define ND_SET(x0,x1,x2,y0,y1,y2)ND_D(x0,x1,x2,=,y0,y1,y2)
//两个分量相等
//(x0,x1,x2)=(y0,y1,y2);
#define ND_SUM(x0,x1,x2) ND_OP(+,x0,x1,x2)
//分量求和
//2D: x0+x1
//3D: x0+x1+x2
#define ND_DOT(x0,x1,x2,y0,y1,y2)ND_OP(+,(x0)*(y0),(x1)*(y1),(x2)*(y2))
//分量点乘
//(x0,x1,x2)·(y0,y1,y2);
#define ND_MAG2(x0,x1,x2)ND_DOT(x0,x1,x2,x0,x1,x2)
//分量模的平方
//|(x0,x1,x2)|^2
#define ND_MAG(x0,x1,x2)sqrt(ND_MAG2(x0,x1,x2))
//分量模
//|(x0,x1,x2)|
#if RP_3D
# define ND_CROSS_X(x0,x1,x2,y0,y1,y2)(((x1)*(y2))-((y1)*(x2)))
//叉乘的x分量
# define ND_CROSS_Y(x0,x1,x2,y0,y1,y2)(((x2)*(y0))-((y2)*(x0)))
//叉乘的y分量
#else
/* (x0,x1,0) X (y0,y1,0) */
# define ND_CROSS_X(x0,x1,x2,y0,y1,y2)(0.0)
# define ND_CROSS_Y(x0,x1,x2,y0,y1,y2)(0.0)
//对2D来说,叉乘的x,y分量均为0
#endif
# define ND_CROSS_Z(x0,x1,x2,y0,y1,y2)(((x0)*(y1))-((y0)*(x1)))
//叉乘的z分量
//分量叉乘
#define NDD_MAX(a0,a1,a2,b0,b1,b2)ND_VEC(MAX((a0),(b0)),MAX((a1),(b1)),MAX((a2),(b2)))
#define NDD_MIN(a0,a1,a2,b0,b1,b2)ND_VEC(MIN((a0),(b0)),MIN((a1),(b1)),MIN((a2),(b2)))
#define ND_MAX(a0,a1,a2,b0,b1,b2)ND_D((a0),(a1),(a2),=,MAX((a0),(b0)),MAX((a1),(b1)),MAX((a2),(b2)))
#define ND_MAX(a0,a1,a2,b0,b1,b2)ND_D((a0),(a1),(a2),=,MAX((a0),(b0)),MAX((a1),(b1)),MAX((a2),(b2)))
#define ND_MIN(a0,a1,a2,b0,b1,b2)ND_D((a0),(a1),(a2),=,MIN((a0),(b0)),MIN((a1),(b1)),MIN((a2),(b2)))
NV_ 向量操作宏
#define NV_S(a,EQ,s)ND_VEC((a)[0]EQ(s),(a)[1]EQ(s),(a)[2]EQ(s))
//a = (s,s,s)
#define NV_V(a,EQ,x)ND_VEC((a)[0]EQ(x)[0],(a)[1]EQ(x)[1],(a)[2]EQ(x)[2])
//a = x (向量)
#define NV_D(a,EQ,x0,x1,x2)ND_D((a)[0],(a)[1],(a)[2],EQ,x0,x1,x2)
//a = (x0,x1,x2)
#define NV_VS(a,EQ,x,S,s)ND_VEC((a)[0]EQ(x)[0]S(s),(a)[1]EQ(x)[1]S(s),(a)[2]EQ(x)[2]S(s))
#define NV_DS(a,EQ,x0,x1,x2,S,s)ND_VEC((a)[0]EQ(x0)S(s),(a)[1]EQ(x1)S(s),(a)[2]EQ(x2)S(s))
#define NV_VV(a,EQ,x,V,y)ND_VEC((a)[0]EQ(x)[0]V(y)[0],(a)[1]EQ(x)[1]V(y)[1],(a)[2]EQ(x)[2]V(y)[2])
#define NV_DD(a,EQ,x0,x1,x2,V,y0,y1,y2) ND_VEC((a)[0]EQ(x0)V(y0),(a)[1]EQ(x1)V(y1),(a)[2]EQ(x2)V(y2))
#define NV_DV(a,EQ,x0,x1,x2,V,y) ND_VEC((a)[0]EQ(x0)V(y)[0],(a)[1]EQ(x1)V(y)[1],(a)[2]EQ(x2)V(y)[2])
#define NV_VV_S(a,EQ,x,V,y,S,s)ND_VEC((a)[0]EQ((x)[0]V(y)[0])S(s),(a)[1]EQ((x)[1]V(y)[1])S(s),(a)[2]EQ((x)[2]V(y)[2])S(s))
#define NV_DV_S(a,EQ,x0,x1,x2,V,y,S,s)ND_VEC((a)[0]EQ((x0)V(y)[0])S(s),(a)[1]EQ((x1)V(y)[1])S(s),(a)[2]EQ((x2)V(y)[2])S(s))
#define NV_DD_S(a,EQ,x0,x1,x2,V,y0,y1,y2,S,s)ND_VEC((a)[0]EQ((x0)V(y0))S(s),(a)[1]EQ((x1)V(y1))S(s),(a)[2]EQ((x2)V(y2))S(s))
#define NV_V_VS(a,EQ,x,V,y,S,s)ND_VEC((a)[0]EQ(x)[0]V((y)[0]S(s)),(a)[1]EQ(x)[1]V((y)[1]S(s)),(a)[2]EQ(x)[2]V((y)[2]S(s)))
#define NV_VS_VS(a,EQ,x,SX,sx,V,y,SY,sy)ND_VEC((a)[0]EQ(((x)[0]SX(sx))V((y)[0]SY(sy))),(a)[1]EQ(((x)[1]SX(sx))V((y)[1]SY(sy))),(a)[2]EQ(((x)[2]SX(sx))V((y)[2]SY(sy))))
#define NV_OP_V(a,EQ,f,b)ND_VEC((a)[0]EQ(f((b)[0])),(a)[1]EQ(f((b)[1])),(a)[2]EQ(f((b)[2])))
//a=f(b)
//f(b)=(f(b[0]),f(b[1]),f(b[2]))
#define NVD_MAX(a,b)ND_VEC(MAX((a)[0],(b)[0]),MAX((a)[1],(b)[1]),MAX((a)[2],(b)[2]))
#define NVD_MIN(a,b)ND_VEC(MIN((a)[0],(b)[0]),MIN((a)[1],(b)[1]),MIN((a)[2],(b)[2]))
#define NV_MAX(a,b)NV_D((a),=,MAX((a)[0],(b)[0]),MAX((a)[1],(b)[1]),MAX((a)[2],(b)[2]))
#define NV_MIN(a,b)NV_D((a),=,MIN((a)[0],(b)[0]),MIN((a)[1],(b)[1]),MIN((a)[2],(b)[2]))
#define NV_MIN_I(v)((v)[0]<(v)[1]?((v)[0]<(v)[2]?0:2):((v)[1]<(v)[2]?1:2))
//向量v最小分量的索引
//v[3]={1,2,3}
//NV_MIN_I(v)=>1;
#define NV_SET(x, y)ND_SET(x[0], x[1], x[2], y[0], y[1], y[2]);
//x=y;
#define NV_DOT(x,y)ND_OP(+,(x)[0]*(y)[0],(x)[1]*(y)[1],(x)[2]*(y)[2])
//x·y
#define NV_MAG2(x)NV_DOT(x,x)
//|x|^2
#define NV_MAG(x)sqrt(NV_MAG2(x))
//|x|
#define NV_DST2(x1,x2)ND_OP(+,SQR((x2)[0]-(x1)[0]),SQR((x2)[1]-(x1)[1]),SQR((x2)[2]-(x1)[2]))
//|x1-x2|^2
#define NV_DST(x1,x2)sqrt(NV_DST2(x1,x2))
//|x1-x2|^2
#define NV_CROSS_X(x,y)ND_CROSS_X(x[0],x[1],x[2],y[0],y[1],y[2])
#define NV_CROSS_Y(x,y)ND_CROSS_Y(x[0],x[1],x[2],y[0],y[1],y[2])
#define NV_CROSS_Z(x,y)ND_CROSS_Z(x[0],x[1],x[2],y[0],y[1],y[2])
#define NV_CROSS(a,x,y)NV_D(a,=,NV_CROSS_X(x,y),NV_CROSS_Y(x,y),NV_CROSS_Z(x,y))
//a=x X y
DEFINE_EXECUTE_AT_END
#define DEFINE_EXECUTE_AT_END(name) EXTERN_C void name(void)
在稳态计算的每次迭代后启用。
在瞬态计算的每个时间步后启用。
Get_Domain
FLUENT_EXPORT Domain *Get_Domain(int id);
1指混合相的区域指针(未开启多相流时所有流体区域均为混合相)
当开启多相流时,可以为大于1的数。此时id为对应相的id
id 是相的id而非区域id。
Domain d = *Get_Domain(1);
很多UDF需要使用Domain *参数,但DEFINE_EXECUTE_AT_END不提供该参数。故需要自己生成一个。
并行编程
并行编程可以加速求解速度。但由于并行中的数据传递等问题,需要将程序并行化。
例如,求解全局最小,每个节点只知道自己所分配的区域的最小值。所有其他节点只知道节点0,而不知道其他节点。
并行编程相对串行编程,主要有两个步骤:
- 单节点操作
- 全局汇总
fluent19.0(印象中的,不一定准确)以后已经没有串行版本了,均为并行版本。
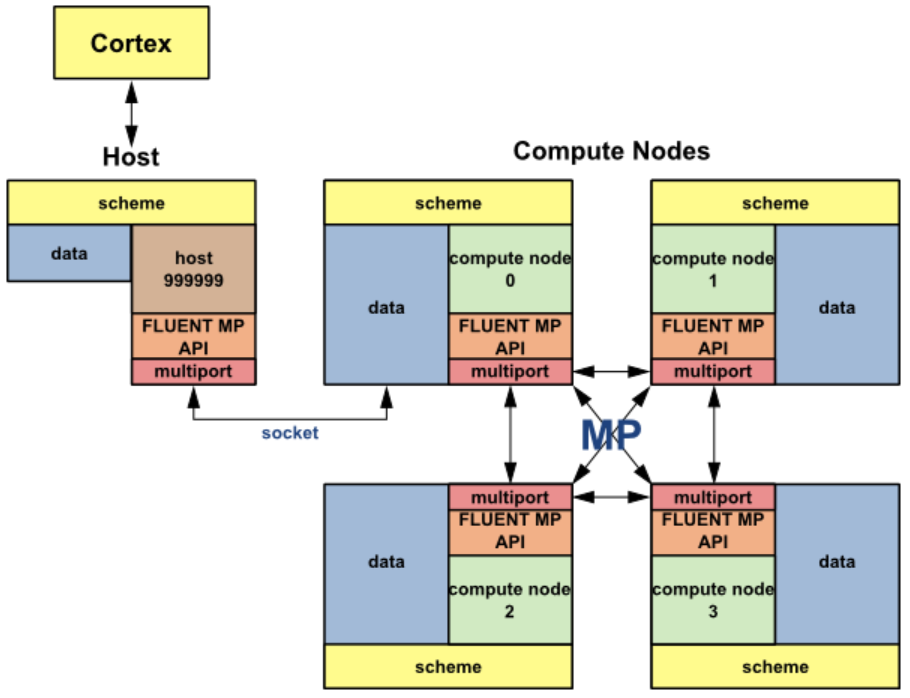
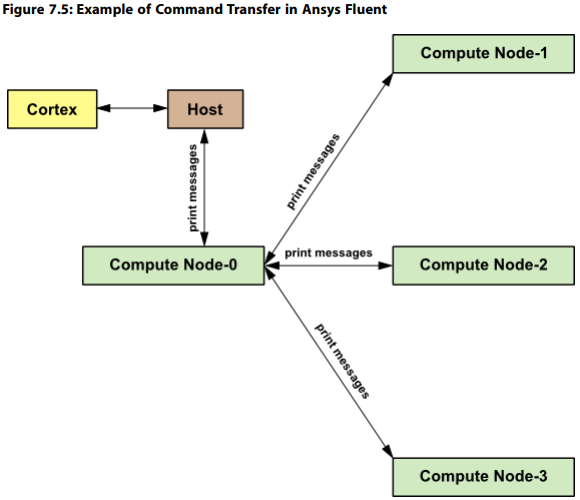
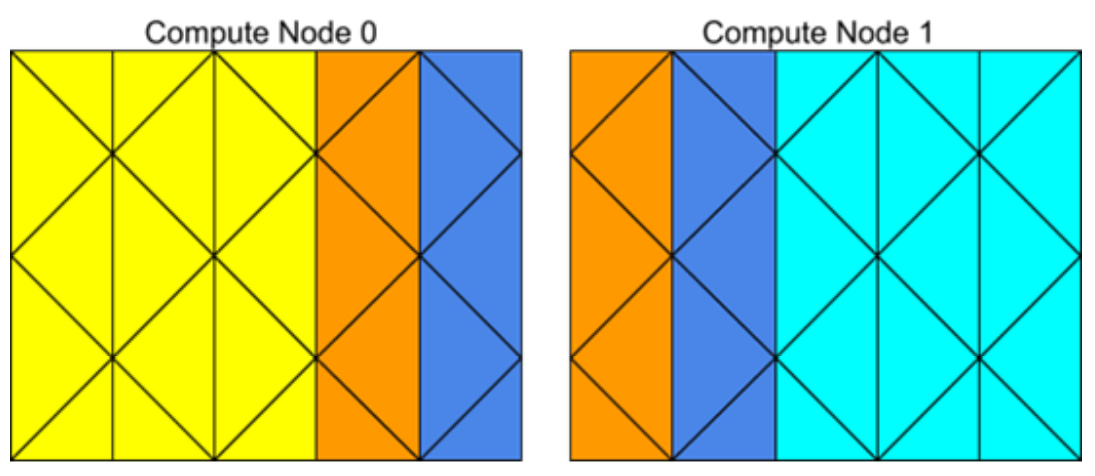
Host 和 Node
- Host:解释来自 Cortex 的命令并将这些命令(和数据)传递给计算Node 0 以进行分发。
- Node 0 :接受来自Host的命令和数据,并分发给其他节点。同时也进行分布计算。全局汇总操作在Node 0进行。
- Node 1-N:接受来自Node 0分发的数据,进行计算,计算完的数据再传回给Node 0。
有些操作需要由Host完成,而有些操作需要由Node 完成,需要将这些操作区分开
Host中没有网格的数据,所有网格相关的操作需要在Host之外操作。
例如求解面平均压强,需要求解总力和总面积,再相除。最后的相处操作若未排除Host,那么就会出现除以0的问题,进而出现 float point exception 错误。
/**********************************************************************/
/* Compiler Directives */
/**********************************************************************/
#if RP_HOST
/* only host process is involved */
#endif
#if RP_NODE
/* only compute nodes are involved */
#endif
/*********************************************************************/
/* Negated forms that are more commonly used */
/*********************************************************************/
#if !RP_HOST
/* only compute nodes are involved */
#endif
#if !RP_NODE
/* only host process is involved */
#endif
Host 和 Node之间的数据传递
host_to_node_type_num(var1,var2,...)
- type:变量类型
- num:变量数量
- var1,va2,…:需要传递的变量
int domain_id_send_to_node = 1;
host_to_node_int_1(domain_id_send_to_node);
//意思就是说把一个名叫domain_id_send_to_node的int型变量送往节点
源码:
/*传递布尔数,最多七个*/
#define host_to_node_boolean_1(a)
#define host_to_node_boolean_2(a,b)
#define host_to_node_boolean_3(a,b,c)
#define host_to_node_boolean_4(a,b,c,d)
#define host_to_node_boolean_5(a,b,c,d,e)
#define host_to_node_boolean_6(a,b,c,d,e,f)
#define host_to_node_boolean_7(a,b,c,d,e,f,g)
/*传递整数数,最多七个*/
#define host_to_node_int_1(a)
#define host_to_node_int_2(a,b)
#define host_to_node_int_3(a,b,c)
#define host_to_node_int_4(a,b,c,d)
#define host_to_node_int_5(a,b,c,d,e)
#define host_to_node_int_6(a,b,c,d,e,f)
#define host_to_node_int_7(a,b,c,d,e,f,g)
#define host_to_node_int64_1(a)
#define host_to_node_int64_2(a,b)
#define host_to_node_long_1(a)
#define host_to_node_long_2(a,b)
#define host_to_node_long_3(a,b,c)
#define host_to_node_long_4(a,b,c,d)
#define host_to_node_long_5(a,b,c,d,e)
#define host_to_node_long_6(a,b,c,d,e,f)
#define host_to_node_long_7(a,b,c,d,e,f,g)
#define host_to_node_long_long_1(a)
#define host_to_node_long_long_2(a,b)
#define host_to_node_long_long_3(a,b,c)
#define host_to_node_long_long_4(a,b,c,d)
#define host_to_node_long_long_5(a,b,c,d,e)
#define host_to_node_long_long_6(a,b,c,d,e,f)
#define host_to_node_long_long_7(a,b,c,d,e,f,g)
/******************************
****传递浮点数,最多传9个变量*******
建议使用real,而不是double和float*/
#define host_to_node_real_1(a)
#define host_to_node_real_2(a,b)
#define host_to_node_real_3(a,b,c)
#define host_to_node_real_4(a,b,c,d)
#define host_to_node_real_5(a,b,c,d,e)
#define host_to_node_real_6(a,b,c,d,e,f)
#define host_to_node_real_7(a,b,c,d,e,f,g)
#define host_to_node_real_8(a,b,c,d,e,f,g,h)
#define host_to_node_real_9(a,b,c,d,e,f,g,h,i)
#define host_to_node_float_1(a)
#define host_to_node_float_2(a,b)
#define host_to_node_float_3(a,b,c)
#define host_to_node_float_4(a,b,c,d)
#define host_to_node_float_5(a,b,c,d,e)
#define host_to_node_float_6(a,b,c,d,e,f)
#define host_to_node_float_7(a,b,c,d,e,f,g)
#define host_to_node_float_8(a,b,c,d,e,f,g,h)
#define host_to_node_float_9(a,b,c,d,e,f,g,h,i)
#define host_to_node_double_1(a)
#define host_to_node_double_2(a,b)
#define host_to_node_double_3(a,b,c)
#define host_to_node_double_4(a,b,c,d)
#define host_to_node_double_5(a,b,c,d,e)
#define host_to_node_double_6(a,b,c,d,e,f)
#define host_to_node_double_7(a,b,c,d,e,f,g)
#define host_to_node_double_8(a,b,c,d,e,f,g,h)
#define host_to_node_double_9(a,b,c,d,e,f,g,h,i)
/**********************************************/
//传递枚举,本质上是一个整数
#define host_to_node_enum_1(a)
//传递文件路径,本质上是一个字符串
#define host_to_node_sync_file(f)
host_to_node_type(var_name,var_num)
- type:数组变量的类型,字符串数组为string而非char
- var_name:数组变量的名字
- var_num:数组的长度
//EXAMPLE 1:
char my_name[]="satisfactions";
host_to_node_string(my_name,14);//注意字符串数组后面隐藏有一个'\0'
//EXAMPLE 2:
int domain_ids[2]={10,15};
host_to_node_int(domain_id,2);
源码:
#define host_to_node_real(a,b)
#define host_to_node_float(a,b)
#define host_to_node_double(a,b)
#define host_to_node_int(a,b)
#define host_to_node_long(a,b)
#define host_to_node_long_long(a,b)
#define host_to_node_boolean(a,b)
#define host_to_node_string(a,b)
同理,从节点向主机传递数据为
node_to_host_type_num(var1,var2,...)
node_to_host_type(var_name,var_num)
#define node_to_host_boolean_1(a)
#define node_to_host_double_1(a)
#define node_to_host_double_2(a,b)
#define node_to_host_double_3(a,b,c)
#define node_to_host_double_4(a,b,c,d)
#define node_to_host_double_5(a,b,c,d,e)
#define node_to_host_double_6(a,b,c,d,e,f)
#define node_to_host_double_7(a,b,c,d,e,f,g)
#define node_to_host_int_1(a)
#define node_to_host_int_2(a,b)
#define node_to_host_int_3(a,b,c)
#define node_to_host_int_4(a,b,c,d)
#define node_to_host_int_5(a,b,c,d,e)
#define node_to_host_int_6(a,b,c,d,e,f)
#define node_to_host_int_7(a,b,c,d,e,f,g)
/*源码里是这样,怀疑它有问题*/
#define host_to_node_int64_1(a)
#define host_to_node_int64_2(a,b)
/*******************/
#define node_to_host_long_1(a)
#define node_to_host_long_2(a,b)
#define node_to_host_long_3(a,b,c)
#define node_to_host_long_4(a,b,c,d)
#define node_to_host_long_5(a,b,c,d,e)
#define node_to_host_long_6(a,b,c,d,e,f)
#define node_to_host_long_7(a,b,c,d,e,f,g)
#define node_to_host_long_long_1(a)
#define node_to_host_long_long_2(a,b)
#define node_to_host_long_long_3(a,b,c)
#define node_to_host_long_long_4(a,b,c,d)
#define node_to_host_long_long_5(a,b,c,d,e)
#define node_to_host_long_long_6(a,b,c,d,e,f)
#define node_to_host_long_long_7(a,b,c,d,e,f,g)
#define node_to_host_real_1(a)
#define node_to_host_real_2(a,b)
#define node_to_host_real_3(a,b,c)
#define node_to_host_real_4(a,b,c,d)
#define node_to_host_real_5(a,b,c,d,e)
#define node_to_host_real_6(a,b,c,d,e,f)
#define node_to_host_real_7(a,b,c,d,e,f,g)
#define node_to_host_float_1(a)
#define node_to_host_float_2(a,b)
#define node_to_host_float_3(a,b,c)
#define node_to_host_float_4(a,b,c,d)
#define node_to_host_float_5(a,b,c,d,e)
#define node_to_host_float_6(a,b,c,d,e,f)
#define node_to_host_float_7(a,b,c,d,e,f,g)
#define node_to_host_real(a,b)
#define node_to_host_float(a,b)
#define node_to_host_double(a,b)
#define node_to_host_int(a,b)
#define node_to_host_long(a,b)
#define node_to_host_long_long(a,b)
#define node_to_host_boolean(a,b)
#define node_to_host_string(a,b)
注意,没有node_to_host_sync_file, node_to_host_enum_1,支持的最大变量数也有差别不一样。
并行循环
并行循环与串行循环不同,其涉及到两个步骤:
- 节点本地处理
- 全局汇总操作
节点循环
beging_c_loop_int(cell,thread)
{
//do somthing
}end_c_loop_int(cell,thread)
beging_f_loop(face,thread)
{
if(PRINCIPAL_FACE_P(face,thread))
{
//do somthing
}
}end_f_loop(face,thread)
全局汇总
此类宏的名称由四部分组成
- 前缀:均为PRF_G
- 数据类型标志:操作的数据的类型
- I–int
- R–real
- L–logical
- B–boolean
- 操作标志:进行什么操作
- SUM–求和
- HIGH–求最大值
- LOW–求最小值
- AND–逻辑和运算
- OR–逻辑或运算
- 版本标志:此类宏有两个版本
- 尾缀加1,表示对单个简单变量进行操作,并可返回一个变量。此时宏的使用为
output=PRF_G[Type][Operation]1(x); - 尾缀不加1,表示对数组进行操作,不返回变量。此时宏的使用为 ` PRF_G[Type]Operation`
- x:进行操作的量级最终的返回值(数组)
- N:数组的长度
- temp_storage:操作中需要使用的临时变量,需要和x类型长度相同
- 尾缀加1,表示对单个简单变量进行操作,并可返回一个变量。此时宏的使用为
//EXAMPLE 1:
//假定现在已经在每个节点对x进行了求和
x=PRF_GRSUM1(x);
//表示对一个类型为real的变量x进行全局求和,求和之后的值再赋给x。
//EXAMPLE 2:
int N = 3;
real x[N]={max_temp,max_press,max_vel};//x的三个成员分别表示温度,压力,速度。
real temp[N];
//假定现在已经在每个节点对x的三个分量求得了最大值
PRF_GRHIGH(x,N,temp);
Lookup_Thread
FLUENT_EXPORT Thread *Lookup_Thread(Domain *, int id);
id : boundaty of cell zone id
Example. 1 求某个区域的面积
/*串行版*/
real area[3];
real total_area = 0.0;
begin_f_loop(face, thread)
{
F_AREA(area, face, thread);
total_area += NV_MAG(area);
}end_f_loop(face, thread)
/*并行版*/
real total_area = 0.0;
#if !RP_HOST
real area[3];
#endif /* !RP_HOST */
#if !RP_HOST
begin_f_loop(face, thread)
{
if (PRINCIPAL_FACE_P(face, thread))
{
F_AREA(area, face, thread);
total_area += NV_MAG(area);
}
}end_f_loop(face, thread)
#if RP_NODE /* Perform node synchronized actions here */
total_area = PRF_GRSUM1(total_area);
#endif /* RP_NODE */
#endif /* !RP_HOST */
Example. 2 求某个区域的体积
/*串行版*/
real total_vol = 0.0;
begin_c_loop(cell, thread)
{
total_vol += C_VOLUME(cell,thread);
}end_c_loop(cell, thread)
/*并行版*/
real total_vol = 0.0;
#if !RP_HOST
begin_c_loop_int(cell, thread)
{
total_vol += C_VOLUME(cell,thread);
}end_c_loop_int(cell, thread)
#if RP_NODE /* Perform node synchronized actions here */
total_vol = PRF_GRSUM1(total_vol);
#endif /* RP_NODE */
#endif /* !RP_HOST */
Get_Report_Definition_Values
FLUENT_EXPORT int Get_Report_Definition_Values(const char *name, int timeStepOrIteration, int *nrOfvalues, real *values, int *ids, int *index);
- [input] const char* name : report definition的名字
- [input] int type : 获取每次迭代数据(0)还是每次时间步的数据(1)。瞬态计算只能用1.
- [output] int* nrOfvalues :该report definition的变量数
- [output] real* values : 该report definition的变量
- [output] int* ids : 跟该report definition相关的surface/zone的ID。(如果 per-zone 或 per-surface 选项关闭,且surfaces/zones数量大于1,将返回-1
- [output] int* index : 该report definition的索引(第几次迭代/时间步)
- [return] 0-获取成功/1-该report definition不存在,获取失败
一般来说,需要调用两次。第一次,获取变量数,并按此分配内存空间。第二次再获取相应的变量。
int nrOfvalues=0;
real *values;
int *ids;
int index;
int counter;
char[] defName = "report-def-0";
/*第一次调用*/
int rv = Get_Report_Definition_Values(defName, 1, &nrOfvalues, NULL,
NULL, NULL);
if (rv == 0 && nrOfvalues) {
Message("Report definition evaluated at iteration has %d values\n",
nrOfvalues);
/*为 values 和 ids 分配内存.*/
values = (real *)malloc(sizeof(real) * nrOfvalues);
ids = (int *)malloc(sizeof(int) * nrOfvalues);
/*第二次调用,获取 values 和 ids.*/
rv = Get_Report_Definition_Values(defName, 1, NULL, values, ids,
&index);
/***********/
/***操作 do something*****/
/*释放内存*/
free(values);
free(ids);
} else {
/*不存在或还未求值,调用失败.*/
if (rv == 1) {
Message("report definition: %s does not exist\n", defName);
} else if (nrOfvalues == 0) {
Message("report definition: %s not evaluated at iteration level\n",
defName);
}
return;
}
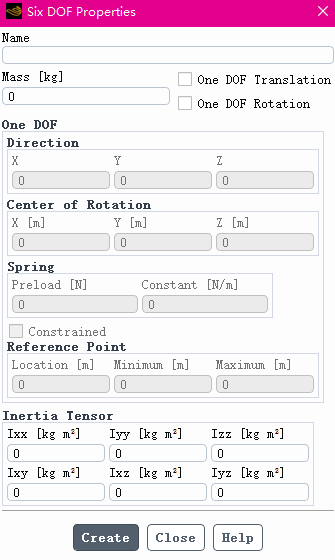
DEFINE_SDOF_PROPERTIES
#define DEFINE_SDOF_PROPERTIES(name, properties, dt, time, dtime) \
EXTERN_C void name(real *properties, Dynamic_Thread *dt, real time, real dtime)
| Type | Parameter | Notes |
|---|---|---|
| symbol | name | UDF名字 |
| real* | properties | 指向六自由度属性数组的指针 |
| Dynamic_Thread* | dt | 指向动网格相关属性结构体的指针 |
| real | time | 当前时间 |
| real | dtime | 时间步 |
| void | return | 无返回值 |
六自由度求解器
利用物体受到的力和力矩计算物体重心的平动和转动。
\[\dot{\vec{v}}_G=\frac{1}{m} \sum \left(\vec{f}_{G,e}+\vec{G}\right )\] \[\dot{\vec{\omega}}_B=L^{-1}\left(\sum \vec{M}_B-\vec{\omega}_B \times L \vec{\omega}_B\right)\] \[\vec{M}_B=R \vec{M}_G\] \[R= \left[\begin{array}{ccc} C_\theta C_\psi & C_\theta S_\psi & -S_\theta \\ S_\phi S_\theta C_\psi-C_\phi S_\psi & S_\phi S_\theta S_\psi+C_\phi C_\psi & S_\phi C_\theta \\ C_\phi S_\theta C_\psi+S_\phi S_\psi & C_\phi S_\theta S_\psi-S_\phi C_\psi & C_\phi C_\theta \end{array}\right]\]一般来说$C_\chi=\cos (\chi)$ , $S_\chi=\sin (\chi)$ ; $\phi$, $\theta$,$\psi$为欧拉角。
使用
六自由度对象
/* ,/mesh/six_dof.h */
typedef struct six_dof_object
{
char name[132];
real mass;
real Ixx;
real Iyy;
real Izz;
real Ixy;
real Iyz;
real Ixz;
/*************One DOF Parameters*************/
cxboolean onedof_t_p; //是否开启单自由度平动
cxboolean onedof_r_p; //是否开启单自由度转动
cxboolean onedof_cons_p; //是否开启位置约束
real dir[3]; //单自由度平动方向
real rot_loc[3]; //单自由度旋转中心
real loc;
real loc_n;
real init;
real min;
real max;
real preload;
real spring;
/******************One DOF******************/
struct six_dof_object *next;
} Six_DOF_Object;
六自由度属性
typedef enum
{
//质量
SDOF_MASS = 0,
//转动惯量
SDOF_IXX,
SDOF_IYY,
SDOF_IZZ,
SDOF_IXY,
SDOF_IXZ,
SDOF_IYZ,
//六自由度参考系:FALSE-全局坐标系;TRUE-局部坐标系
SDOF_LOAD_LOCAL, /* boolean */
//外力
SDOF_LOAD_F_X,
SDOF_LOAD_F_Y,
SDOF_LOAD_F_Z,
//外力矩
SDOF_LOAD_M_X,
SDOF_LOAD_M_Y,
SDOF_LOAD_M_Z,
//TURE-使用自定义变换矩阵;FALSE-不使用
SDOF_CUSTOM_TRANS, /* boolean */
//变换矩阵
SDOF_CTRANS_11,
SDOF_CTRANS_12,
SDOF_CTRANS_13,
SDOF_CTRANS_21,
SDOF_CTRANS_22,
SDOF_CTRANS_23,
SDOF_CTRANS_31,
SDOF_CTRANS_32,
SDOF_CTRANS_33,
//变换矩阵2
SDOF_DTRANS_11,
SDOF_DTRANS_12,
SDOF_DTRANS_13,
SDOF_DTRANS_21,
SDOF_DTRANS_22,
SDOF_DTRANS_23,
SDOF_DTRANS_31,
SDOF_DTRANS_32,
SDOF_DTRANS_33,
//平动自由度
SDOF_ZERO_TRANS_X, /* all zero switches are boolean */
SDOF_ZERO_TRANS_Y,
SDOF_ZERO_TRANS_Z,
//旋转自由度
SDOF_ZERO_ROT_X,
SDOF_ZERO_ROT_Y,
SDOF_ZERO_ROT_Z,
//半模型的对称面法向量
SDOF_SYMMETRY_X,
SDOF_SYMMETRY_Y,
SDOF_SYMMETRY_Z,
SDOF_SIZE_PROP /* has to be the last entry */
} SDOF_Prop;
六自由度属性设置
可以通过类似properties[SDOF_MASS]的方法设置六自由度属性
或者通过以下宏设置六自由度属性:
#define SDOFP_MASS(s) (s[SDOF_MASS])
#define SDOFP_MOI(s) (s+SDOF_IXX) /* moments of inertia */
#define SDOFP_POI(s) (s+SDOF_IXY) /* products of inertia */
#define SDOFP_LOAD_LOCAL(s) (s[SDOF_LOAD_LOCAL]) /* load forces/moments */
#define SDOFP_LOAD_F(s) (s+SDOF_LOAD_F_X)
#define SDOFP_LOAD_M(s) (s+SDOF_LOAD_M_X)
#define SDOFP_CUSTOM_TRANS(s) (s[SDOF_CUSTOM_TRANS])/* costum transformations */
#define SDOF_CTRANS SDOF_CTRANS_11
#define SDOF_DTRANS SDOF_DTRANS_11
#define SDOFP_CTRANS(s) (s+SDOF_CTRANS)
#define SDOFP_DTRANS(s) (s+SDOF_DTRANS)
#define SDOFP_ZERO_TRANS(s) (s+SDOF_ZERO_TRANS_X)
#define SDOFP_ZERO_ROT(s) (s+SDOF_ZERO_ROT_X)
#define SDOFP_SYMMETRY(s) (s+SDOF_SYMMETRY_X) /* symmetry plane normal */
获取六自由度对象
sdof_obj = Get_SDOF_Object(DT_PU_NAME(dt));
#define DT_PU_NAME(s) ((s)->profile_udf_name) //通过动网格指针获取六自由度对象的名字。
FLUENT_EXPORT Six_DOF_Object *Get_SDOF_Object(char[132]);//通过名字获取六自由度对象。
设置六自由度对象的属性
可以通过以下宏设置六自由度对象的属性(不推荐直接设置对象属性)
#define SDOFO_NAME(sobj) ((sobj)->name)
#define SDOFO_MASS(sobj) ((sobj)->mass)
#define SDOFO_IXX(sobj) ((sobj)->Ixx)
#define SDOFO_IYY(sobj) ((sobj)->Iyy)
#define SDOFO_IZZ(sobj) ((sobj)->Izz)
#define SDOFO_IXY(sobj) ((sobj)->Ixy)
#define SDOFO_IYZ(sobj) ((sobj)->Iyz)
#define SDOFO_IXZ(sobj) ((sobj)->Ixz)
#define SDOFO_1DOF_T_P(sobj) ((sobj)->onedof_t_p)
#define SDOFO_1DOF_R_P(sobj) ((sobj)->onedof_r_p)
#define SDOFO_CONS_P(sobj) ((sobj)->onedof_cons_p)
#define SDOFO_DIR(sobj) ((sobj)->dir)
#define SDOFO_CENTER_ROT(sobj)((sobj)->rot_loc)
#define SDOFO_INIT(sobj) ((sobj)->init)
#define SDOFO_LOC(sobj) ((sobj)->loc)
#define SDOFO_LOC_N(sobj) ((sobj)->loc_n)
#define SDOFO_MIN(sobj) ((sobj)->min)
#define SDOFO_MAX(sobj) ((sobj)->max)
#define SDOFO_F(sobj) ((sobj)->preload)
#define SDOFO_K(sobj) ((sobj)->spring)
#define SDOFO_NEXT(sobj) ((sobj)->next)
样例
Example 1. 定义六自由度属性
#include "udf.h"
DEFINE_SDOF_PROPERTIES(sdof_prop, prop,dt,time,dtime)
{
prop[SDOF_MASS] = 800.0;
prop[SDOF_IXX] = 200.0;
prop[SDOF_IZZ] = 100.0;
}
Example 2. 定义半模型的属性
#include "udf.h"
DEFINE_SDOF_PROPERTIES(sdof_prop, prop,dt,time,dtime)
{
prop[SDOF_MASS] = 800.0;
prop[SDOF_IXX] = 200.0;
prop[SDOF_IZZ] = 100.0;
prop[SDOF_SYMMETRY_X] = 0;
prop[SDOF_SYMMETRY_Y] = 0;
prop[SDOF_SYMMETRY_Z] = 1;
}
Example 3. 限制转动
#include "udf.h"
DEFINE_SDOF_PROPERTIES(sdof_prop, prop,dt,time,dtime)
{
prop[SDOF_MASS] = 800.0;
prop[SDOF_IXX] = 200.0;
prop[SDOF_IZZ] = 100.0;
prop[SDOF_ZERO_ROT_X] = TRUE;
prop[SDOF_ZERO_ROT_Y] = TRUE;
prop[SDOF_ZERO_ROT_Z] = FALSE;
}
Example 4. 限制平动
#include "udf.h"
DEFINE_SDOF_PROPERTIES(sdof_prop, prop,dt,time,dtime)
{
prop[SDOF_MASS] = 800.0;
prop[SDOF_IXX] = 200.0;
prop[SDOF_IZZ] = 100.0;
prop[SDOF_ZERO_TRANS_X] = TRUE;
prop[SDOF_ZERO_TRANS_Y] = TRUE;
prop[SDOF_ZERO_TRANS_Z] = FALSE;
}
Example 5. 外力作用
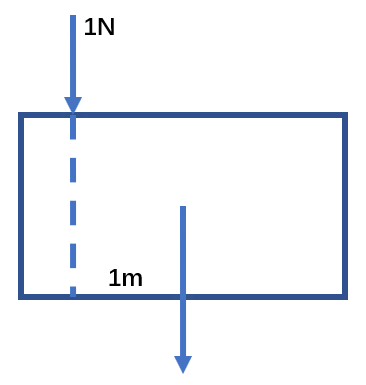
初始状态:
\[F_z=1N;\] \[M_z=1N\cdot m\]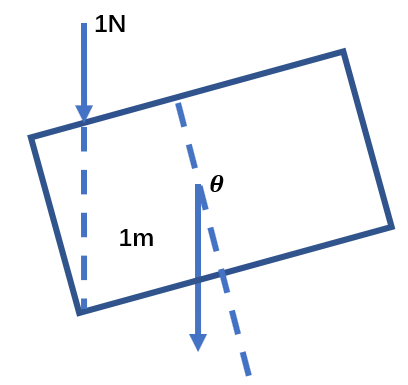
#include "udf.h"
#define F_Z 1
#define DIST 1
DEFINE_SDOF_PROPERTIES(external_force,prop,dt,time,dtime)
{
prop[SDOF_MASS] = 800.0;
prop[SDOF_IXX] = 200.0;
prop[SDOF_IYY] = 150.0;
prop[SDOF_IZZ] = 100.0;
real theta = DT_THETA(dt)[2];
prop[SDOF_LOAD_F_Z] = F_Z;
porp[SDOF_LOAD_M_Z] = F_Z/0.70710678*cos(theta+1.570796327);
}
Example 6. 单自由度平动
#include "udf.h"
DEFINE_SDOF_PROPERTIES(one_dof_trans,prop,dt,time,dtime)
{
prop[SDOF_MASS] = 800.0;
prop[SDOF_IXX] = 200.0;
prop[SDOF_IYY] = 150.0;
prop[SDOF_IZZ] = 100.0;
sdof_obj=Get_SDOF_Object(DT_PU_NAME(dt));
if(NULLP(sdof_obj))
{
SDOFO_1DOF_T_P(sdof_obj)=TRUE; //开启单自由度平动
SDOFO_1DOF_R_P(sdof_obj)=FALSE; //关闭单自由度转动
SDOFO_DIR(sdof_obj)[0]=0.0; //单自由度平动方向矢量
SDOFO_DIR(sdof_obj)[1]=0.0;
SDOFO_DIR(sdof_obj)[2]=1.0;
SDOFO_CONS_P(sdof_obj)=TRUE; //位置限制
SDOFO_LOC(sdof_obj)=0.0; //初始位置
SDOFO_MIN(sdof_obj)=-0.5; //最小限制
SDOFO_MAX(sdof_obj)=0.5; //最大限制
SDOFO_F(sdof_onj)=0.0; //预作用力
SDOFO_K(sdof_obj)=0.0; //弹簧常数
SDOFO_INIT(sdof_obj)=SDOF_LOC(sdof_obj);
SDOFO_LOC_N(sdof_obj)=SDOF_LOC(sdof_obj);
}
}
Example 6. 单自由度转动
#include "udf.h"
DEFINE_SDOF_PROPERTIES(one_dof_rot,prop,dt,time,dtime)
{
prop[SDOF_MASS] = 800.0;
prop[SDOF_IXX] = 200.0;
prop[SDOF_IYY] = 150.0;
prop[SDOF_IZZ] = 100.0;
sdof_obj=Get_SDOF_Object(DT_PU_NAME(dt));
if(NULLP(sdof_obj))
{
SDOFO_1DOF_T_P(sdof_obj)=TRUE; //关闭单自由度平动
SDOFO_1DOF_R_P(sdof_obj)=FALSE; //开启单自由度转动
SDOFO_DIR(sdof_obj)[0]=0.0; //转动中心坐标
SDOFO_DIR(sdof_obj)[1]=0.0;
SDOFO_DIR(sdof_obj)[2]=1.0;
SDOFO_CONS_P(sdof_obj)=TRUE; //位置限制
SDOFO_LOC(sdof_obj)=0.0; //初始位置
SDOFO_MIN(sdof_obj)=-0.5; //最小限制
SDOFO_MAX(sdof_obj)=0.5; //最大限制
SDOFO_F(sdof_onj)=0.0; //预作用力矩
SDOFO_K(sdof_obj)=0.0; //扭力弹簧常数
SDOFO_INIT(sdof_obj)=SDOF_LOC(sdof_obj);
SDOFO_LOC_N(sdof_obj)=SDOF_LOC(sdof_obj);
}
}
Example 7. 双向流体-刚体运动耦合
/*实现简单的流体与刚体运动的双向耦合*/
/*需要开启Implict Update*/
/*六自由度求解器一定会考虑重力,不需要手动添加重力的影响*/
/*手动添加的均为外力*/
#include "udf.h"
/*****define some constants*****/
#define MASS 1
/********************/
static real total_force_z;
DEFINE_SDOF_PROPERTIES(one_dof_trans,prop,dt,time,dtime)
{
prop[SDOF_MASS] = MASS;
prop[SFOF_LOAD_F_Z] = total_froce_z;
sdof_obj=Get_SDOF_Object(DT_PU_NAME(dt));
if(NULLP(sdof_obj))
{
SDOFO_1DOF_T_P(sdof_obj)=TRUE; //开启单自由度平动
SDOFO_1DOF_R_P(sdof_obj)=FALSE; //关闭单自由度转动
SDOFO_DIR(sdof_obj)[0]=0.0; //单自由度平动方向矢量
SDOFO_DIR(sdof_obj)[1]=0.0;
SDOFO_DIR(sdof_obj)[2]=1.0;
SDOFO_CONS_P(sdof_obj)=TRUE; //位置限制
SDOFO_LOC(sdof_obj)=0.0; //初始位置
SDOFO_MIN(sdof_obj)=-0.5; //最小限制
SDOFO_MAX(sdof_obj)=0.5; //最大限制
SDOFO_F(sdof_onj)=0.0; //预作用力
SDOFO_K(sdof_obj)=0.0; //弹簧常数
SDOFO_INIT(sdof_obj)=SDOF_LOC(sdof_obj);
SDOFO_LOC_N(sdof_obj)=SDOF_LOC(sdof_obj);
}
}
/*利用UDF获取作用力*/
DEFINE_EXECUTE_AT_END(compute_vel) {
Domain *domain=Get_Domain(1);
int domain_id_send_to_node;
real force_temp = 0;
real total_force_z = 0;
real dv=0;
/*************并行版循环**************/
//此处定义仅在计算节点中使用的变量
#if !RP_HOST
Thread *thread;
face_t face;
real area[ND_ND];
#endif
//将需要进行循环的区域ID分发到节点上
domain_id_send_to_node = 10;
/*主机与节点的数据交换*/
host_to_node_int_1(domain_id_send_to_node);
#if !RP_HOST
thread = Lookup_Thread(domain, domain_id_send_to_node);
begin_f_loop(face, thread)
/*边界可能进行两次计算,利用PRINCIPAL_FACE_P(face, thread)避免*/
if (PRINCIPAL_FACE_P(face, thread)) {
F_AREA(area, face, thread);
force_temp += area[2] * F_P(face, thread);
}
end_f_loop(face, thread)
#if RP_NODE /* Perform node synchronized actions here */
force_temp = PRF_GRSUM1(force_temp);
#endif /* RP_NODE */
#endif /* !RP_HOST */
/**********************************/
total_force_z += force_temp;
}
/*利用Report definition获取作用力*/
DEFINE_ADJUST(compute_vel_from_definition)
{
/*使用Get_Report_Definition_Values需要的变量*/
int nrOfvalues = 0;
real *values;
int *ids;
int index;
int counter;
/*计算当前速度需要的变量*/
real dv;
real total_force_z;
/*********获取报告定义值************/
//第一次调用,获取values的个数
int rv = Get_Report_Definition_Values("report-def-0", 1, &nrOfvalues, NULL,
NULL, NULL);
if (rv == 0 && nrOfvalues) {
Message("Report definition evaluated at iteration has %d values\n",
nrOfvalues);
/*为 values 和 ids 分配内存.*/
values = (real *)malloc(sizeof(real) * nrOfvalues);
ids = (int *)malloc(sizeof(int) * nrOfvalues);
/*第二次调用,获取 values 和 ids.*/
rv = Get_Report_Definition_Values("report-def-0", 1, NULL, values, ids,
&index);
/*calculate current velocity*/
total_force_z=values[0];
/*释放内存*/
free(values);
free(ids);
} else {
/*不存在或还未求值,调用失败.*/
if (rv == 1) {
Message("report definition: %s does not exist\n", "report-def-0");
} else if (nrOfvalues == 0) {
Message("report definition: %s not evaluated at iteration level\n",
"report-def-0");
}
return;
}
}
补充知识
动网格工具宏DT_
/*dynamesh_tools.h*/
typedef struct dynamic_thread_rigid_body_state
{
real cg[3]; /* center of gravity
position wrt global */
quaternion q; /* orientation quaternion */
real theta[3]; /* orientation angles wrt global,
Euler angles for 6-dof */
real v_cg[3]; /* instantaneous cg velocity
vector */
real omega_cg[3]; /* instantaneous cg angular
velocity vector */
real acc_cg[3]; /* instantaneous
cg acceleration vector */
real alpha_cg[3]; /* instantaneous cg angular
acceleration vector */
real dir[3]; /* direction of motion */
real W[3]; /* Convective angular velocity */
real A[3]; /* Convective angular acceleration */
real torque[3]; /* Torque */
} Dynamic_Thread_Rigid_Body_State;
/*dynamesh_tools.h*/
#define DT_THREAD_NEXT(s) ((s)->next)
#define DT_THREAD(s) ((s)->thread)
#define DT_RB_CURR_STATE(s) ((s)->current_state)
#define DT_CG(s) ((s)->current_state.cg)
//当前重心坐标
#define DT_Q(s) ((s)->current_state.q)
//当前刚体的四元数
#define DT_VEL_CG(s) ((s)->current_state.v_cg)
//瞬时重心速度矢量
#define DT_OMEGA_CG(s) ((s)->current_state.omega_cg)
//瞬时重心角速度矢量
#define DT_ACC_CG(s) ((s)->current_state.acc_cg)
//瞬时加速度矢量
#define DT_ALPHA_CG(s) ((s)->current_state.alpha_cg)
//瞬时角加速度矢量
#define DT_THETA(s) ((s)->current_state.theta)
//随体坐标系欧拉角
#define DT_DIR(s) ((s)->current_state.dir)
//运动方向矢量
#define DT_W(s) ((s)->current_state.W)
//Convective angular velocity Omega=R^{-1}*dR/dt
//R:旋转矩阵,随体坐标和全局坐标的转换矩阵
#define DT_A(s) ((s)->current_state.A)
//对流角加速度
#define DT_TORQUE(s) ((s)->current_state.torque)
//当前扭矩
/*初始状态宏,和上面一样,但是是初始状态*/
#define DT_RB_INIT_STATE(s) ((s)->init_state)
#define DT_RB_TMP_STATE(s) ((s)->tmp_state)
#define DT_INIT_CG(s) ((s)->init_state.cg)
#define DT_INIT_Q(s) ((s)->init_state.q)
#define DT_INIT_THETA(s) ((s)->init_state.theta)
#define DT_INIT_VEL_CG(s) ((s)->init_state.v_cg)
#define DT_INIT_OMEGA_CG(s) ((s)->init_state.omega_cg)
#define DT_INIT_ACC_CG(s) ((s)->init_state.acc_cg)
#define DT_INIT_ALPHA_CG(s) ((s)->init_state.alpha_cg)
#define DT_INIT_DIR(s) ((s)->init_state.dir)
/*初始状态宏,和上面一样,但是是初始状态*/
#define DT_DIR_REF(s) ((s)->dir_ref)
//运动参考方向
#define DT_DIR_PREV(s) ((s)->dir_prev)
//之前运动的参考方向
#define DT_AXIS(s) ((s)->axis)
//运动的随体坐标轴
#define DT_GEOM_ORIGIN(s) ((s)->geom_origin)
#define DT_GEOM_AXIS(s) ((s)->geom_axis)
#define DT_GEOM_RADIUS(s) ((s)->geom_radius)
#define DT_FEATURE_P(s) ((s)->geom_feature_p)
#define DT_FEATURE_ANGLE(s) ((s)->geom_feature_angle)
#define DT_UPDATE_FNC(s) ((s)->update)
#define DT_LEN(s) ((s)->len)
#define DT_MIN_LSCALE(s) (DT_REMESH_GLOBALS_P(s)? \
remesh_min_lscale:(s)->len[0])
#define DT_MAX_LSCALE(s) (DT_REMESH_GLOBALS_P(s)? \
remesh_max_lscale:(s)->len[1])
#define DT_MAX_SKEW(s) (DT_REMESH_GLOBALS_P(s)? \
(CELL_THREAD_P(DT_THREAD(s))? \
remesh_max_cell_skew:remesh_max_face_skew): \
(s)->len[2])
#define DT_REFO(s) ((s)->refo)
#define DT_PU_NAME(s) ((s)->profile_udf_name)
#define DT_VLIST(s) ((s)->lnodes)
#define DT_TYPE(s) ((s)->type)
#define DT_UDF_TYPE(s) ((s)->udf_type)
#define DT_HEIGHT(s) ((s)->h)
#define DT_SLIDE_P(s) ((s)->sliding)
#define DT_SLIDE_METHOD(s) ((s)->sliding_method)
#define DT_SLIDE_ELEMENTS(s) ((s)->sliding_elements)
#define DT_REMESH_P(s) ((s)->remesh)
#define DT_REMESH_METHOD(s) ((s)->remeshing_method)
#define DT_REMESH_GLOBALS_P(s) ((s)->remesh_globals_p)
#define DT_LAYER_P(s) ((s)->layering)
#define DT_BL_DEFORM_P(s) ((s)->boundary_layer_deform)
#define DT_UDF_DEFORM_P(s) ((s)->user_defined_deform)
#define DT_BC_EXCLUDE_MOTION_P(s) ((s)->bc_exclude_motion)
#define DT_COUNTER(s) ((s)->face_remesh_count)
#define DT_LOOPS(s) ((s)->loops)
#define DT_NLOOPS(s) ((s)->nloops)
#define DT_LAYER(s) ((s)->layer)
#define DT_LAY_FAC(s) ((s)->layer_factor)
#define DT_RACTION(s) ((s)->face_remesh_action)
#define DT_GEOM_NAME(s) ((s)->geometry_name)
#define DT_REMESH_SEP(s) ((s)->separate_region)
#define DT_SDOF_P(s) ((s)->sdof_p)
#define DT_PERDISP_P(s) ((s)->perdisp_p)
#define DT_SDOF_CONT_P(s) ((s)->sdof_contribute_p)
#define DT_HIDEAL_UDF(s) ((s)->h_udf_name)
#define DT_CONTACT_UDF(s) ((s)->contact_udf_name)
#define DT_UPDATE_STATE(s) ((s)->update_state)
#define DT_RTMP1(s) ((s)->tmp_r1)
#define DT_RTMP2(s) ((s)->tmp_r2)
#define DT_ITMP1(s) ((s)->tmp_i1)
#define DT_GOCART(s) ((s)->gocart_param)
#define DT_GOCART_MAX(s) ((s)->gocart_param[0])
#define DT_GOCART_RATE(s) ((s)->gocart_param[1])
#define DT_GOCART_QUALITY(s) ((s)->gocart_param[2])
#define DT_GOCART_RATIO(s) ((s)->gocart_param[3])
#define DT_GOCART_INTERVAL(s) ((s)->gocart_param[4])
#define DT_GOCART_PRISMS_P(s) ((s)->gocart_prisms_p)
#define DT_GOCART_PRISM_TYPE(s) ((s)->gocart_prism_param.offset_method)
#define DT_GOCART_PRISM_H(s) ((s)->gocart_prism_param.h)
#define DT_GOCART_PRISM_AR(s) ((s)->gocart_prism_param.ar)
#define DT_GOCART_PRISM_NLAYER(s) ((s)->gocart_prism_param.nlayer)
#define DT_GOCART_PRISM_RATE(s) ((s)->gocart_prism_param.growth_rate)
#define DT_SOP_SWITCH(s) ((s)->sop_comp)
#define DT_SOP_METHOD_NAME(s) ((s)->sop_type_name)
#define DT_SOP_METHOD(s) ((s)->sop_type)
#define DT_SOP_SCALE(s) ((s)->sop_scale)
#define DT_NESTED_P(s) ((s)->nested_p)
#define DT_NEST_THREAD(s) ((s)->nest_thread)
#define DT_NEST_LOC_ROT_P(s) ((s)->nested_local_rot_p)
#define DT_NEST_LOC_TRAN_P(s) ((s)->nested_local_tran_p)
DEFINE_DYNAMIC_ZONE_PROPERTY
#define DEFINE_DYNAMIC_ZONE_PROPERTY(name, dt, lh) \
EXTERN_C void name(Dynamic_Thread *dt, real *lh)
| Type | Parameter | Notes |
|---|---|---|
| symbol | name | UDF名字 |
| Dynamic_Thread* | dt | 指向动网格相关属性结构体的指针 |
| real * | lh | 指向网格层高的指针或旋转中心数组的指针。 |
DEFINE_CONTACT
定义检测到发生接触之后的操作。
#define DEFINE_CONTACT(name, dt, contacts) \
EXTERN_C void name(Dynamic_Thread *dt, Objp *contacts)
| Type | Parameter | Notes |
|---|---|---|
| symbol | name | UDF名字 |
| Dynamic_Thread* | dt | 指向动网格相关属性结构体的指针 |
| Objp * | contacts | 指向接触检测事件中涉及的单元的链表的指针。以 NULL 结尾 |
补充知识
窄缝的控制
窄缝的控制主要有以下四种方法:
- gap model
- contact detection
- dynamic mesh events
- 手动控制
Gap Model
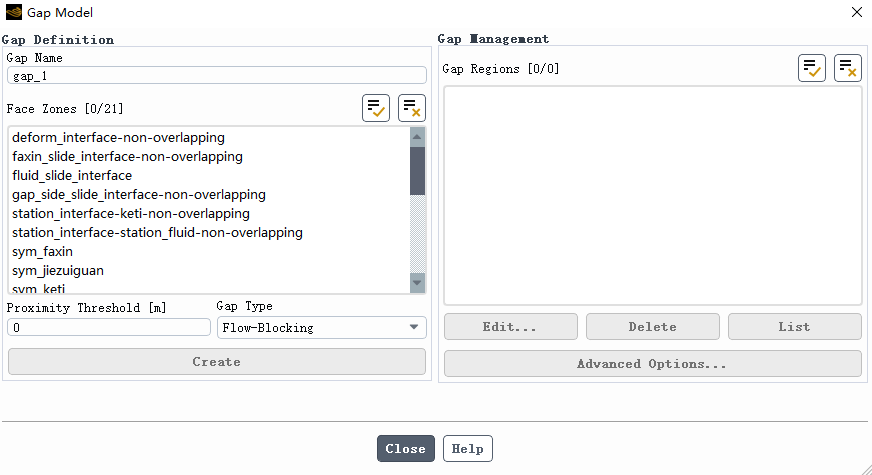
Flow-Blocking
判定为Gap的地方的流动会完全禁止。
Flow-Modeling
\[\mathrm{Re}_{\mathrm{gap}}=\frac{\rho_{\mathrm{avg}} u_{\mathrm{avg}} L}{\mu_{\mathrm{avg}}}\]通过设置的雷诺数控制gap区域的流动
Limitations
不能在和以下设置同时使用:
- density-based solver
- axisymmetric swirl
- Eulerian multiphase model
- ablation model
- Eulerian wall film model
- Lagrangian wall film model
- solidification/melting model
- electric potential model
- Lithium-ion battery model
- acoustics models
- structural model
- discrete phase model (DPM)
- radiation models
- species models (with the exception of species transport for mixing but not reacting)
- pollutant formation models
- reactor network model
- decoupled detailed chemistry pollutant model
- multiphase flow with species transport
- the following turbulence models / options: Reynolds stress models (RSM), Scale-Adaptive Simulation (SAS) model, Detached eddy simulation (DES) model, Large Eddy Simulation (LES) model, Scale-Resolving Simulation Options (SAS, DES, or SBES/SDES)
- Green-Gauss Node Based gradient method (for flow-blocking type only)
- QUICK or MUSCL discretization schemes (for flow-blocking type only)
- Non-Iterative Time Advancement (NITA) scheme
- coupled walls are not allowed to be selected for a gap region
- the gap model cannot be used in a case that also has the Flow Control option enabled in the Contact Detection
- the porous zone option cannot be enabled in cell zones where gaps are located
Contact Detection
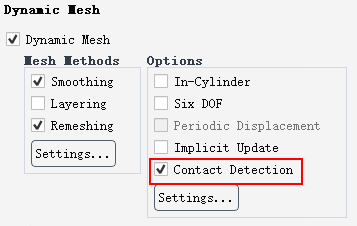
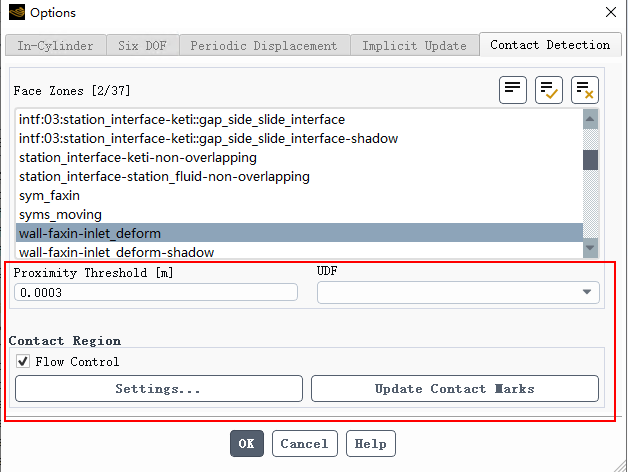
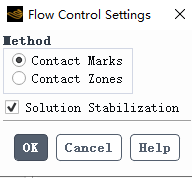
Contact Marks
将标记区域的边界设置为零质量流量条件
Contact Zones
将标记区域单独划分出来,设置为多孔介质,通过设置阻力系数控制内部流动。
Dynamic Mesh Events
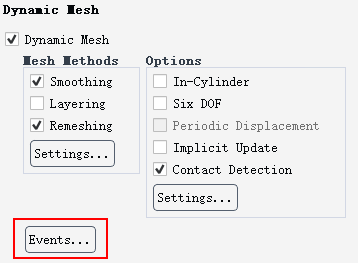
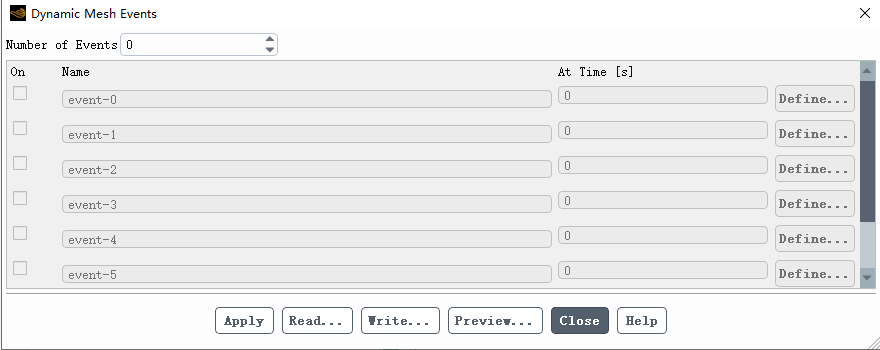
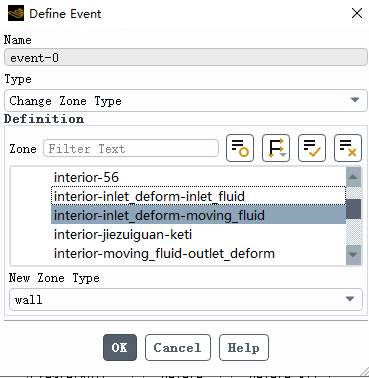
在窄缝处手动设置一个边界。初始为wall,阻止流动。在指定时间(此时窄缝已变得足够宽),将该边界的类型由wall修改为interior。
手动控制
手动设置wall边界
不使用Dynamic mesh events,而是按照其思路手动设置壁面,手动修改壁面类型。
手动设置多孔介质区域
按照 Contact Zones的思路,将某区域设置为多孔介质区域,在指定时间(此时窄缝已变得足够宽),去除多孔介质设置。
小结
| 方法 | 是否完全阻止流动 | 是否适用于周期运动 |
|---|---|---|
| Gap Model Flow-Blocking | √ | √ |
| Gap Model Flow-Modeling | × | √ |
| Contact Detection Contact Marks | √ | √ |
| Contact Detection Contact Zones | × | √ |
| Dynamic Mesh Events | √ | x |
| 手动边界 | √ | √ |
| 手动多孔介质 | × | √ |
周期运动:窄缝变宽后还会变窄
单向运动:窄缝变宽后不会变窄
- 能使用 Gap Model 就使用 Gap Model。
-
在不能使用 Gap Model 时:
- 对于单向运动,优先选择手动多孔介质。
- 对于周期运动,优先选择Contact Detection Contact Zones。
- 对于System Coupling,使用Contact Detection。
本文由 joe_zhouman 创作,采用 知识共享署名4.0
国际许可协议进行许可
本站文章除注明转载/出处外,均为本站原创或翻译,转载前请务必署名
最后编辑时间为:2024-08-23 16:37:48