关于有限体积法的一些认识
有限体积法的离散化
统一高斯公式
在场论中常用到的梯度公式,散度公式(高斯公式),旋度公式(斯托克斯公式公式)可以统一为如下形式,方便记忆: \(\int_V\nabla \otimes A =\oint_{\partial V}\boldsymbol{n}\otimes AdS\)
\[\nabla \otimes A =\lim\limits_{V\rightarrow 0}\frac{1}{V} \oint_{\partial V}\boldsymbol{n}\otimes AdS\]当A为标量$\varphi$时,为梯度公式: \(\int_V\nabla\varphi =\oint_{\partial V}\boldsymbol{n}\varphi dS\) 当A为矢量$\boldsymbol{F}$,$\otimes$为点乘时,此时为散度公式(即高斯公式): \(\int_V\nabla\cdot\boldsymbol{F} =\oint_{\partial V}\boldsymbol{n}\cdot\boldsymbol{F} dS\) 当A为矢量$\boldsymbol{F}$,$\otimes$为叉乘时,此时为旋度公式(即斯托克斯公式): \(\int_V\nabla\times\boldsymbol{F} =\oint_{\partial V}\boldsymbol{n}\times\boldsymbol{F} dS\) 另一种形式也是如此。
这三个公式能统一基于同样的物理含义:
控制体积内的物理量变化=从控制体积边界进出的物理量
下面可以开始推导了

标量
\[\int_V QdV\approx Q_c\Delta V\]$Q_c$为控制体积中心的物理量,其精度为二阶。
梯度项离散
fluent里面对梯度项的处理有三种方式,可在Solution->Methods-> Spatial Discretization-> Gradient中选择,如图:
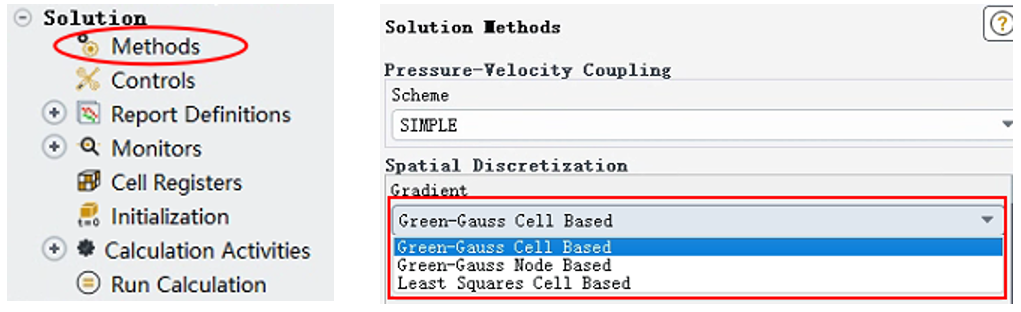
共三种方式,现简单介绍如下:
Creen-Guass Gradient
利用上面的公式:
\(\frac{\partial \varphi}{\partial x}=\lim\limits_{V\rightarrow 0}\frac{1}{V}\int_V\frac{\partial \varphi}{\partial x}dV=\lim\limits_{V\rightarrow 0}\frac{1}{V}\oint_{\partial V}\boldsymbol{n}_x\varphi dS\approx \frac{1}{\Delta V}\sum\limits_{i=1}^{n}\varphi_f A_i^x\)
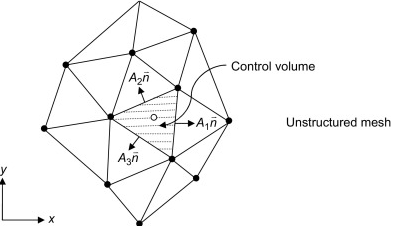
$\varphi_f$为网格界面的物理量,其需要通过周围网格的相应物理量重构(restriction)得到。
重构(restriction)和插值(interpolation)不是等同的,可以理解为:插值是重构的一种方法,但重构还有其他方法。
下面介绍fluent中使用的两种重构模板:
Creen-Guass Cell Based
或称格林-高斯梯度紧凑型模板(Creen-Guass gradient Compact Stencil)
即使用两个共面单元的值取平均作为面上物理量的值,其有如下形式: \(\phi_{f}=g_{C} \phi_{C}+\left(1-g_{C}\right) \phi_{F}\) 对于结构化网格,当$g_c$取0或1时,$\phi_f$为$\phi_F$或$\phi_F$ 其梯度项可化简为向前差分或向后差分。当然,这样做只有一阶精度,并不常用。
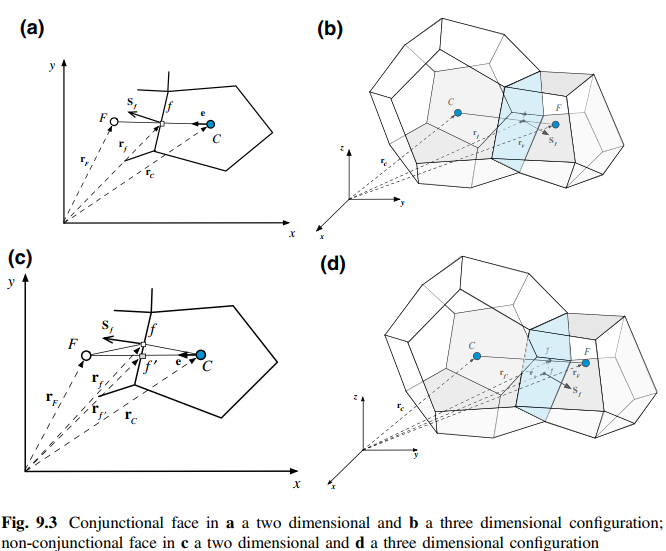
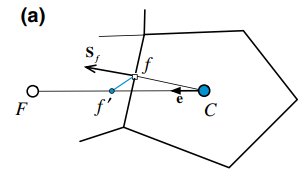
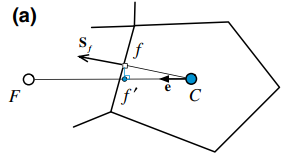
另一种$g_c$按如下取值: \(g_{C}=\frac{\left\|\mathbf{r}_{F}-\mathbf{r}_{f}\right\|}{\left\|\mathbf{r}_{F}-\mathbf{r}_{C}\right\|}=\frac{d_{F f}}{d_{F C}}\) 此时对于结构化网格,此时 \(\phi_{f}=\frac{\phi_{C}+\phi_{F}}{2}\) 其可化简为中心差分格式。当两个相邻单元中心的插值点$S_{f^\prime}$与面中心$S_f$重合时,具有二阶精度,如图(a)所示。其他情况下,需要先计算插值点$S_{f^\prime}$的值,再通过$S_{f^\prime}$的值估算$S_f$的值,如图(c)所示,修正公式如下: \(\phi_f=\phi_{f^{\prime}}+(\nabla \phi)_{f^{\prime}} \cdot\left(\mathbf{r}_{f}-\mathbf{r}_{f^{\prime}}\right)\)
\[\begin{aligned} \phi_{f} &=g_{C}\left\{\phi_{C}+(\nabla \phi)_{C} \cdot\left(\mathbf{r}_{f}-\mathbf{r}_{C}\right)\right\}+\left(1-g_{C}\right)\left\{\phi_{F}+(\nabla \phi)_{F} \cdot\left(\mathbf{r}_{f}-\mathbf{r}_{F}\right)\right\} \\ &=\phi_{f^{\prime}}+\underbrace{g_{C}(\nabla \phi)_{C} \cdot\left(\mathbf{r}_{f}-\mathbf{r}_{C}\right)+\left(1-g_{C}\right)(\nabla \phi)_{F} \cdot\left(\mathbf{r}_{f}-\mathbf{r}_{F}\right)}_{\text {correction }} \end{aligned}\]插值点$S_{f^\prime}$有三种取法。
1.界面上的点。如上图(c)所示。
2.相邻单元中心连线的中点:
3.距f点最近的点。
其有各自的算法,这里不再展开。
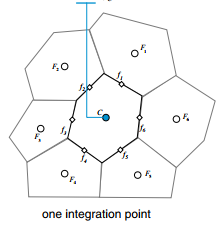
Creen-Guass Node Based
或称格林-高斯梯度扩展型模板(Creen-Guass Gradient Extended Stencil)
即通过界面两顶点的值取平均值得到。
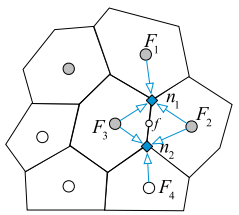 \(\phi_{n}=\frac{\sum\limits_{k=1}^{N B(n)} \frac{\phi_{F_{k}}}{\left\|\mathbf{r}_{n}-\mathbf{r}_{F_{k}}\right\|}}{\sum\limits_{k=1}^{N B(n)} \frac{1}{\left\|\mathbf{r}_{n}-\mathbf{r}_{F_{k}}\right\|}}\)
\(\phi_{n}=\frac{\sum\limits_{k=1}^{N B(n)} \frac{\phi_{F_{k}}}{\left\|\mathbf{r}_{n}-\mathbf{r}_{F_{k}}\right\|}}{\sum\limits_{k=1}^{N B(n)} \frac{1}{\left\|\mathbf{r}_{n}-\mathbf{r}_{F_{k}}\right\|}}\)
如上图所示,先根据$F_1,F_2,F_3$的值求出$n_1$处的值,根据$F_2,F_3,F_4$的值求出$n_2$处的值,再得到$f$点的值。
Least-Squares Gradient
最小二乘法梯度 Least-Squares Cell Based。
其梯度通过优化如下函数得到: \(\begin{aligned} G_{C} &=\sum_{k=1}^{N B(C)}\left\{w_{k}\left[\phi_{F_{k}}-\left(\phi_{C}+\nabla \phi_{C} \cdot \mathbf{r}_{C F_{k}}\right)\right]^{2}\right\} \\ &=\sum_{k=1}^{N B(C)}\left\{w_{k}\left[\Delta \phi_{k}-\left(\Delta x_{k}\left(\frac{\partial \phi}{\partial x}\right)_{C}+\Delta y_{k}\left(\frac{\partial \phi}{\partial y}\right)_{C}+\Delta z_{k}\left(\frac{\partial \phi}{\partial z}\right)_{C}\right)\right]^{2}\right\} \end{aligned}\) 其中自变量为梯度的三个分量。即: \(\frac{\partial G_{C}}{\partial\left(\frac{\partial \phi}{\partial x}\right)}=\frac{\partial G_{C}}{\partial\left(\frac{\partial \phi}{\partial y}\right)}=\frac{\partial G_{C}}{\partial\left(\frac{\partial \phi}{\partial z}\right)}=0\) 极值点的值即为$\nabla\phi_C$
该方法中最重要的是权重$w_k$的确认。以上方法至少有一阶精度(不详细描述了)。
小结
根据以上理论,可以对以上方法做一个小结。首先是计算开销,有
Green-Gause Cell Based < Least-Squares Cell Based < Green-Gause Node Based
但显然,Green-Gause Cell Based方法的精度对于网格质量要求较高,低质量网格显然是不能使用该方法的。
在面对复杂的工程问题时,不可避免的会碰到低质量网格,此时 Least-Squares Cell Based < Green-Gause Node Based 有着接近且较高的精度,故而通常采用Least-Squares Cell Based 方法。而对于网格质量很高的模型,可以选用Green-Gause Cell Based方法节省计算开销。
扩散项的离散
扩散项通常有如下形式: \(-\nabla \cdot\left(\Gamma^{\phi} \nabla \phi\right)=Q\) 比如热量扩散方程,扩散项为 \(-\nabla \cdot\left(\kappa \nabla T\right)=-\frac{\partial }{\partial x}(\kappa_{x} \frac{\partial T}{\partial x})-\frac{\partial }{\partial y}(\kappa_{y} \frac{\partial T}{\partial y})-\frac{\partial }{\partial z}(\kappa_{z} \frac{\partial T}{\partial z})\) 通常的处理方式为定义一个流, \(\boldsymbol{J} =-\Gamma^{\phi} \nabla \phi,\quad Q = \nabla \boldsymbol{J}\) 比如根据傅里叶定律,有热流: \(q = -\kappa\nabla T\) 根据上面对梯度的处理,进行两次离散处理。当然具体还有很多门道,这里暂时不再细说。
本文由 joe_zhouman 创作,采用 知识共享署名4.0
国际许可协议进行许可
本站文章除注明转载/出处外,均为本站原创或翻译,转载前请务必署名
最后编辑时间为:2022-05-07 10:12:48